■特徴
ロボットハンドを短時間で簡単に交換できます。
独自の離脱機構搭載です。(特許第4126074号)
フェールセーフ機構内蔵です。
エアーチェッキ弁内蔵です。(ロボット側)
エアーオプションの追加が可能です。
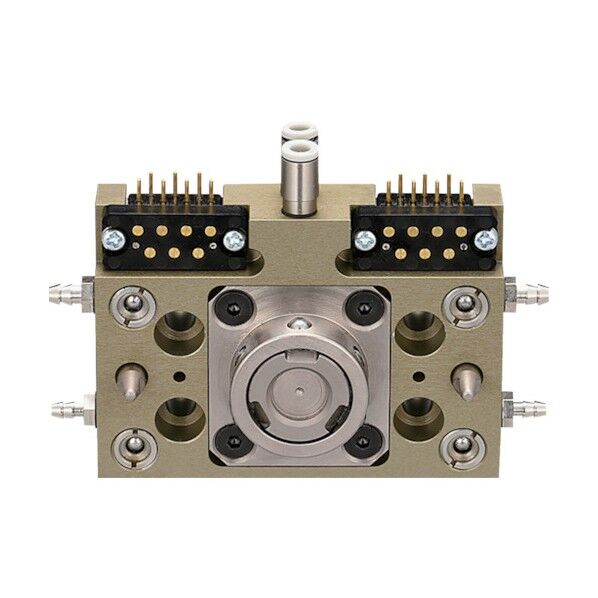
■仕様
コネクタ形成:プローブコネクタ
位置再現精度:±0.02mm
使用空気圧:0.5~0.7MPa
配管接続:SSB(4回路M5)、SBS(6回路/M5)
電気接点:7芯×2 (2A DC24V Max)
連結時の厚み:29mm
■材質
超ジュラルミン+鉄製
| タイプ | ロボット側 | 奥行(mm) | 75.6 |
|---|---|---|---|
| 高さ(mm) | 28.8 | 幅(mm) | 85 |
| 引込力/押出力(N) | 1500/480 | 可搬重量(kg) | ~3 |
| トラスコ品番 | 388-8441 |
| タイプ | ロボット側 |
|---|---|
| 奥行(mm) | 75.6 |
| 高さ(mm) | 28.8 |
| 幅(mm) | 85 |
| 引込力/押出力(N) | 1500/480 |
| 可搬重量(kg) | ~3 |
| トラスコ品番 | 388-8441 |



ここにテキストがはいりますここにテキストがはいりますここにテキストがはいりますここにテキストがはいりますここにテキストがはいりますここにテキストがはいります


































































